
Written by: Poerbandono
The mapping of seafloor topography has been largely relying on standard hydrographic echosounders. Sounds propagate effectively in seawater. Their natures are well recognized and become the basis of knowledge in the design of underwater surveys’ technology. With that, sonar devices (including echosounders) are hence developed and fortified with specific features for different purposes.
The depth of water is determined by identifying the interface between the water column and the material that makes up the seabed. With sediments being the typical seabed materials, the propagating sounds from the echosounder experience impedance mismatch produced by the gradient of density between the water column and the sediments. Strong signals from high frequency echosounder results from an extreme gradient of impedance mismatch on the water-sediment interface due to the presence of solid bottom on the seabed. However, in locations where the sediments are soft, such an extreme gradient becomes subtle. The echo signature received by the echosounder’s transducer is less identifiable to distinguish the returned signal corresponding to the presence of the solid seabed. The direct effect of such ambiguous echo detection is the underestimation of depth. This occurs since the high-frequency sonar is sensitive to impedance mismatches even at low gradient.
Underestimation of depth results in loss of navigable water and overestimation of dredging volume. Our field test in the Patimban port construction area (Indonesia) confirms that the use of a standard hydrographic echosounder with 210 kHz working frequency underestimates the detection of ‘depth’ by approximately 0.1 m. Also from our field test, the use of low-frequency echosounder at 24 kHz overshoots the ‘depth’ by 0.3 m. The ‘depth’ discussed in this sense refers to the shipping safety standard established by the Permanent International Association of Navigation Congresses (PIANC) as a critical depth limit beyond which contact with a ship’s keel causes either damage or unacceptable effects on controllability and manoeuvrability, termed nautical depth. With that, the interface separating the water and the depth is termed as nautical bottom.
In many cases, the nautical bottom is described in sediment density representing the area, obtained from either physical measurement using a mechanical instrument or laboratory tests of sampled sediments rather than using the standard hydrographic echosounders. From the same field test we suggest that the nautical bottom in the Patimban port construction area should be associated with sediment density criteria of between 1.29 and 1.33 t/m3. The tests were executed by deploying a GraviProbe (i.e., cone penetrometer device) combined with geotechnical drilling along with laboratory tests of the undisturbed core samples. These allow the development of an empirical relation between the undrained shear strength and sediment density, where the presence of the physical bottom is determined from the maximum changes of the gradient in the shear strength. The comparison of the vertical relation of the penetrometer depth and the echosounder provides an insight that the nautical bottom typically lies about the upper one-fourth of approximately 0.4 m separation between the high- and low-frequency soundings and is hence underestimated by the hydrographic survey.
Full article: https://doi.org/10.1016/j.apor.2022.103359
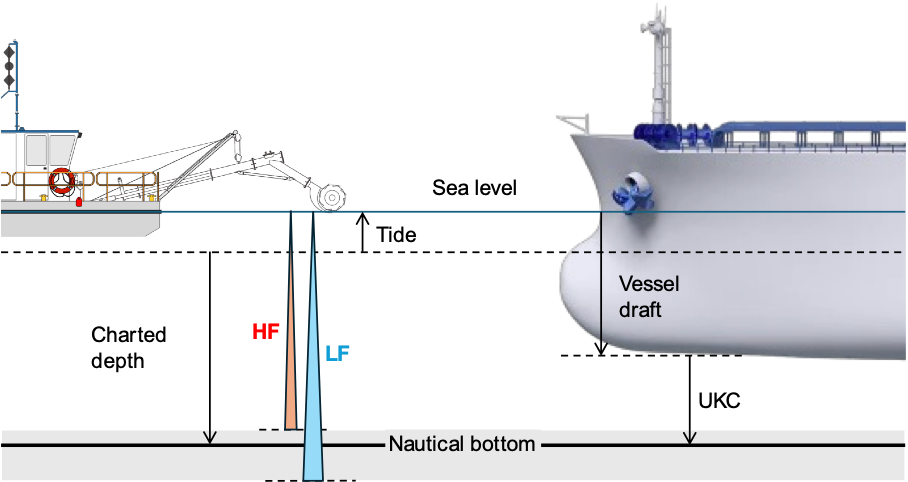
Figure: Illustrative of the nautical bottom within the detectable boundary of the high- and low-frequency echosounder (i.e., HF = 210 kHz, LF = 24 kHz) required for the determination of the charted depth leading to a requirement for an accurate estimateion of the under-keel clearance (UKC) in an attempt to assure the safety of vessel navigation in shallow water. In the Patimban port Indonesia, HF underestimates the nautical bottom by 0.1 m, while LF overshoots it by 0.3 m.